ZR 256-02Z-ST-RE-2589-4
项目编号:
153016793

| 产品描述: (1)(2) 2(3)5-(4)Z(5)-(6)-(7)-(8)-(9) |
| (1) | |
| Z | 速动 |
| T | 缓动 (不适用于AF/S) |
| (2) | |
| S | 直杆 S |
| R | 滚轮直杆 R |
| 4S | 直杆 4S |
| 4R | 滚轮直杆 4R |
| 1R | 偏置滚轮摇臂 1R |
| K | 偏置滚轮摇臂 K |
| 3K | 角度滚轮摇臂 3K |
| 4K | 角度滚轮摇臂 4K |
| K4 | 角度滚轮摇臂 K4 |
| 1H | 滚轮摇臂 1H |
| 7H | 滚轮摇臂 7H |
| 10H | 棒杆 10H |
| 12H | 滚轮摇臂 12H |
| 14H | 滚轮摇臂 14H |
| AF | 弹簧棒杆 AF |
| RMS | 黄铜滚轮 |
| (3) | |
| 3 | 外型细长 |
| 215 | 外型较大 |
| (4) | |
| 02 | 2 NC 触点 |
| 11 | 1 NO 触点/1 NC 触点 |
| 20 | 2 NO触点(带2个NO触点的开关不适用于安全操作) |
| (5) | |
| H | 缓动带非同步触头 |
| UE | 缓动带交错触头 |
| Z | 附件和外壳之间的额外密封 |
| (6) | |
| M16 | 电缆入口M16 |
| 无 | M20接线口 |
| ID | 破线夹 |
| NPT | NPT 1/2“接线口 |
| ST | 带A译码的M12连接器(注意!根据EN 60204-1,此带连接器的版本只能用于PELV电路 |
| ST-2310 | 带B译码的M12连接器(注意!根据EN 60204-1,此带连接器的版本只能用于PELV电路 |
| (7) | |
| 2574 | 带有L型安装孔的外壳(水平或垂直可调) |
| (8) | |
| 2138 | 滚轮摇臂7H,用于带安全功能的限位开关 |
| (9) | |
| 1637 | 镀金触头 |
并非所有根据本订单代码可能的组件变体都可用和/或在技术上可行。
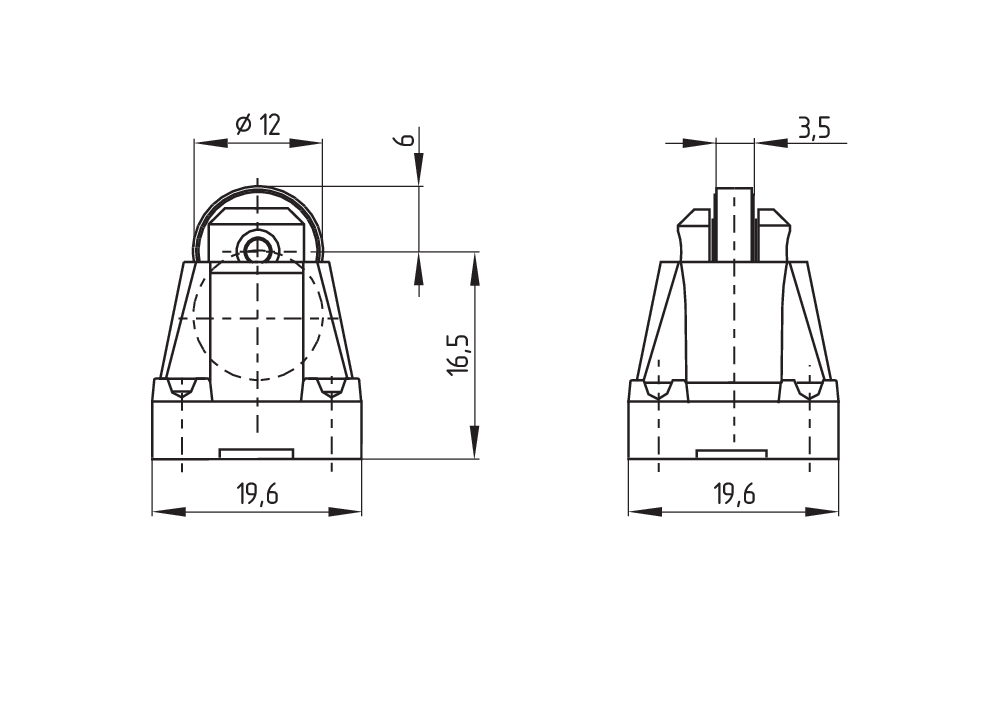
- 符合EN 50047安装细节
- 热塑外壳
- 双绝缘
- 58 mm x 50,5 mm x 31 mm
- 耐油和石油产品
- 大量的二选一操动件
- 操动头可按4 x 90°重新安装
订货数据
| 型号 |
ZR 256-02Z-ST-RE-2589-4 |
| 商品编号(订购编号) |
153016793 |
| EAN(欧洲商品编号) |
4030661509372 |
| eCl@aa number,版本:12.0 |
27-27-26-01 |
| eCl@aa number,版本:11.0 |
27-27-26-01 |
| eCl@aa number,版本:9.0 |
27-27-26-01 |
| ETIM 编号,7.0 版 |
EC000030 |
| ETIM 编号,6.0 版 |
EC000030 |
许可 - 标准
| 证书 |
CCC |
总体数据
| 标准型 |
BG-GS-ET-15 EN ISO 13849-1 EN IEC 60947-5-1 |
| 外壳结构类型 |
标准结构设计 |
| 操动件型号符合 EN 50047 |
c |
| 外壳材料 |
塑料,玻璃纤维增强 |
| 毛重 |
99 g |
总体数据 - 产品特性
| 安全功能 |
是 |
安全评估
| 标准型 |
EN ISO 13849-1 |
| 任务时间 |
20 年 |
机械参数
| 执行元件 |
滚轮直杆 |
| 机械寿命,最少 |
20,000,000 操作 |
| 操动力,最小 |
9 N |
| 肯定断开操作力,最小 |
19 N |
| 操动速度,最大 |
1 m/s |
| 注(操动速度) |
操作角度30°至开关轴的操动速度 |
机械参数 - 连接技术
| 连接器位置 |
右侧 |
| 连接器 |
连接器M12,4芯 连接器插头M12,4芯,(B编码) |
| 线缆截面,最小 |
.75 mm² |
| 电缆截面,最大 |
2.5 mm² |
| 注(电缆截面) |
包括导体套管在内的所有指标。 |
机械参数 - 尺寸
| 传感器长度 |
31 mm |
| 传感器宽度 |
58 mm |
| 传感器高度 |
67 mm |
环境条件
| 工作环境温度 |
-30 ... +80 °C |
环境条件 - 绝缘值
| 额定冲击耐受电压 Uimp |
6 kV |
电气参数
| 热测试电流 |
10 A |
| 要求额定短路电流 |
1,000 A |
| 应用类别 AC-15 |
4 A |
| 应用类别 DC-13 |
24 VDC |
| 应用类别 DC-13 |
1 A |
| 开关原理 |
速动型 |
| 开关频率 |
5,000 /h |
| 触点材料,电气 |
银 |
语言条件
数据表
操作说明书(补充页/快速指南)
CCC认证
SISTEMA-VDMA 数据库
下载最新版本的Adobe Reader
产品图片(单独目录照片)
尺寸图 操动件
施迈赛工业开关制造(上海)有限公司, 上海市青浦区漕盈路3336号,
所涉及的详细信息和数据已经过仔细检查。 图像可能与原始图像有所不同。 您可在说明书中进一步获得技术数据。 可能会有技术修改和错误。
生成日期 2025/8/18 上午9:48